
|

|
Здравствуйте, гость ( Вход | Регистрация )

  |

 25.2.2010, 11:37 25.2.2010, 11:37
Сообщение
#1
|
|||||
|
Технический турист  Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
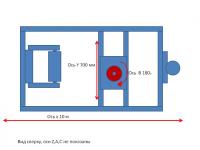
Привет. Имеется деревообрабатывающий станок токарно-фрезерного типа с большим полем (оцилиндровка, самодельный). Привод пока что "ручная механика". Хочется попробовать перевести все это дело на автоматику. Посоветуйте систему управления, главное что бы была обратная связь с контролем положения энкодерами (допуски при таких размерах +- 1мм) + нужно одновременное управление хотя бы двумя осями. Хочу поставить гидравлику, т.к. она очень гибкая в управлении (можно легко прицепить параллельное ручное управление) а сама гидравлика управлялась бы логикой (есть электро клапаны гидравлические с логическим управлением). Гидравлика имхо при оси длинной 10м великолепно вписалась бы в плане вариативности скоростей прохода и возврата, да и дешевле ШД в разы.
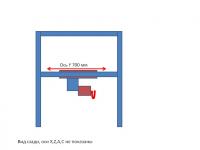
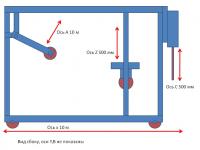
Схематично станок выглядит так
Буду очень благодарен за любой совет. PS рассматривал вариант питерской фирмы ОАО СКБИС в виде панели управления, но она очень и очень дороговата в полном комплекте. чето загрузчик файлов глючит на форуме... Сообщение отредактировал andreichsb - 25.2.2010, 11:40
Эскизы прикрепленных изображений
|
||||
 |
 
|
||||



|
25.2.2010, 22:00
Сообщение
#2
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
Извиняюсь, гидравлика с аналоговым управлением +/-10v
|
|
|
|
|
26.2.2010, 0:02
Сообщение
#3
|
|
 Прописанный Группа: Главные администраторы Сообщений: 3127 Регистрация: 7.10.2006 Из: Санкт-Петербург Пользователь №: 4 |
с осями по картинкам не понять,но с гидравликой без обратной связи по положению думаю не получится.
-------------------- Проблем нет,есть задачи.
|
|
|
|

|
26.2.2010, 18:37
Сообщение
#4
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
так мне и нужно с обратной связью, а что непонятно по картинкам?
|
|
|
|
|
27.2.2010, 23:43
Сообщение
#5
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Цитата(andreichsb @ 26.2.2010, 16:37)  так мне и нужно с обратной связью, а что непонятно по картинкам? Тогда ставить энкодры прямо на оси и управлять эл. клапанами - при этом думаю пострадает динамика станка и можно будет использовать только одну скорость подачи (как фотоплоттерах) и соответственно работу только с углом кратным 45градусов, плюс нестандартный контроллер управления, (конечно я могу незнать возможности современной гидравлики и ошибаться), либо гидравлический усилитель крутить мощным шаговиком или серво. Неуверен что это все будет дешевле чем просто на шаговых двигателях и рейках. Сообщение отредактировал retaler - 27.2.2010, 23:47 |
|
|
|
|
28.2.2010, 12:25
Сообщение
#6
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
хорошо, давайте поставим вопрос по другому.
пусть это будут шаговики (я мало что в этом понимаю, зато в гидравлике достаточно) посоветуйте систему и компоненты для данной задачи. опять же нужно что бы была возможность управления как минимум двумя осями одновременно и обратная связь по положению. т.е задача может стоять "пройти по Y 600мм" а может "пройти по Y 1mm одновременно пройти по X 1mm, повторить цикл", т.е. скажем к оси X ось Y строго перпендикулярна, но иногда стоит задача пройти к оси X под углом в 45гр, таким образом смещение по осям в единицу времени будет одинаковым по расстоянию, но и контроль положения тоже нужен, так как если команды будут даны (не забываем что это дерево, может скажем попасться сучек, соответственно сопротивление движению по какой либо оси может во время прохода возрасти) а какая то ось не выполнит задачу, заготовка будет безнадежна испорчена. Тут уже чисто коммерческий интерес, если на токарном станке точить какую либо деталь из стали 3 то цена ей 3 рубля, у меня же цена одной детали может достигать 1000р :(. Хотя конечно же и 3 рубля потерять тоже "не интерес", и детали разные бывают и на токарке..... Плюс опять если это шаговики то требуется гибкая система управления скоростью. Если для гидравлики с аналоговым управлением можно программно задать синусоиду открытия клапана для рабочего хода с неполным открытием, а для холостого обратного (скажем по оси X 10метров длинной) хода с полным открытием клапана для увеличения скорости возврата и соответственно экономии времени, то с шаговиками..., повторюсь - я не знаю. |
|
|
|
|
28.2.2010, 12:37
Сообщение
#7
|
|
|
Прописанный Группа: Главные администраторы Сообщений: 3127 Регистрация: 7.10.2006 Из: Санкт-Петербург Пользователь №: 4 |
вы при аналоговом управлении гидравликой не знаете объем перекаченной жидкости.
и соответственно не знаете куда переместилась координата. нужна обратная связь по положению.это или линейка (что на 10м лихо) или поворотный энкодер, приводимый от координаты или тросиком или рейкой. соответственно, есть смысл рассмотреть серво систему,а управлять не моторами,а клапанами. Обратитесь в Балт систем,может у них такие решения были. более того,гидроциллиндр на 10м скорее всего телескоп,а соответственно переменный объем жидкости. Я б в случае одного циллиндра и невысокой точности поставил на каждую координату реверсивный насос по принципу например 8ми поршневого плунжера и приводил его шаговиком. это как гидромотор устроено. Низкая цена решения,мало гимора. -------------------- Проблем нет,есть задачи.
|
|
|
|
|
28.2.2010, 14:03
Сообщение
#8
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
для 10ти метровой координаты и было задумано применение гидромотора - высокая мощность при небольшом расходе и высокая точность.
|
|
|
|
|
28.2.2010, 14:07
Сообщение
#9
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Может мои представления о гидравлике немного устарели, но я напрочь непонимаю как в гидросистеме можно "синусоидой" открывать клапан.
насколько я знаю, перемещает цилиндр только гидрокомпрессор, и если в системе есть гидроусилитель, то его конструкция основана на двух роторах- управляющем и силовым, тоесть в этой системе силовой ротор следит за управляющим в кольцевом режиме и когда они совпадают то канал перекрывается и поршень останавливается. Сила поворота "силового" поршня зависит от мощности гидрокомпрессора а производительность всей системы- от пропускного диаметра соединительных труб и самих компонентов. Управляющий ротор можно поворачивать даже вручную рычагом это при том что давление жидкости может достигать 200 атм. Если именно такая система является "аналоговой" то понадобится шаговый двигатель, драйвер, энкодер на одну ось плюс все гидравлические причандалы. Стоимость электрической части на 1 канал - драйвер около 220$ на 6..8А микрошаг, движек шаговый китайский на ток 6А (80кг на валу) - 100..150$ энкодер (например на 512 имп, квадратурный)- ок. 70$. Плюс компютер с масh3, дополнительная lpt плата, также доп. плата с развязками для подключения энкодеров. Также понадобится подключение концевиков, потому что поймать гидропорталом ограничитель можно будет только один раз. Мало того, в своих экспрементах с энкодером, шд и мач3 я сделал вывод что портал с обратной связью через мач работает крайне нестабильно. По этому придется применить серво - а это стоимость помножь на 1.5...3, учитывая сложность что энкодер будет стоять на портале а не на движке и будет подключаться к драйверу а не к lpt порту ------ Стоимость гидроусилителя - около 500-1000$ (может я ошибаюсь?) Сообщение отредактировал retaler - 28.2.2010, 14:11 |
|
|
|
|
28.2.2010, 14:19
Сообщение
#10
|
|
|
Новичок Группа: Пользователи Сообщений: 21 Регистрация: 9.2.2010 Пользователь №: 30282 |
общаюсь на других форумах на эту же тему, вот что выяснил:
тут нужна вот такая система, я думаю что готовые решения есть но я их не встречал(если не трудно ссылку на ресурс, если где то такое встречали): гидрокалапан - пропорциональный двусторонний гидроклапан( 2 клеммы, при подаче обратной полярности открывается в обратную сторону) управление от 0 до 24 вольт. энкодер - инкрементный энкодер считывающий положение "каретки" по управляемой оси. управляющий PC - стационарный комп, с программой управления например Mach3. управление по LPT. девайс ? - как раз таки тот девайс который ищу. требуется чтобы девайс получая от компа данные по step/dir, давал на входе соразмерной напряжение относительно частоты степа, при этом считал количество шагов заданное компом и сравнивал их с количеством импульсов от энкодера, по достижении кареткой заданных значений (step=энкодер) отключение питания. а по dir узнавал полярность напряжения (соответственно направление движения). то есть к примеру для решения одновременного движения по 2 осям выглядело бы так: по оси х сдвинуться на 1 шаг энкодера(открылся выход->открылся клапан->двинулась гидравлика->произошло движение энкодера) по оси у сдвинуться на 1 шаг энкодера(все тоже самое что и выше но для оси у) но тут есть 1 НО: так как время срабатывание клапана очень мало, то при увеличении частоты будет так называемое дребезжание в системе(представьте себе состояние когда в гидравлической системе клапан открывается несколько раз в секунду) тут два варианта: система построенная на обратной связи, есть координата(относительная) которую надо достигнуть, и программа из которой идет управление должна следить за достижением координаты(если кто то знает программы позволяющие цеплять 6 осей обратной связи на энкодерах подскажите пожалуйста куда ковырять) либо же система когда контролер получает данные от компа на сколько надо пробежать, и сам следит за тем сколько пробежал, но в такой системе не будет реалтайма... еще вопрос в том что я знаю что есть готовые решения от крупных фирм занимающихся автоматизацией и чпу но они очень дороги, меня интересуют скажем так "бюджетные" варианты. Сообщение отредактировал ubey_bobra - 28.2.2010, 14:32
Прикрепленные файлы
 рисунок2.bmp ( 503,77 килобайт )
Кол-во скачиваний: 855
рисунок1.bmp ( 332,93 килобайт )
Кол-во скачиваний: 979
рисунок2.bmp ( 503,77 килобайт )
Кол-во скачиваний: 855
рисунок1.bmp ( 332,93 килобайт )
Кол-во скачиваний: 979 |
|
|
|
|
28.2.2010, 14:31
Сообщение
#11
|
|
|
Новичок Группа: Пользователи Сообщений: 21 Регистрация: 9.2.2010 Пользователь №: 30282 |
поясню что такое гидравлическое управление:
гидронасос который работает всегда, качает с давлением к примеру 100кг, в холостом режиме он при помощи настроенного клапана сбрасывает жидкость в резервуар, при открытии клапана он дает давление в цилиндр, открывать клапан можно просто подав макс напряжение, тогда клапан откроется на полное проходное сечение, а можно подав S-образно напряжение, тогда клапан будет открываться и закрываться плавно(насколько плавно подал напряжение настолько плавно откроется клапан) просто Андрей немножко неправильно выразился... и никаких гидроусилителей, то есть все работает только на гидроцилиндрах либо же на гидромоторах(а ля на длине 10 метров) |
|
|
|
|
28.2.2010, 20:35
Сообщение
#12
|
|
|
Прописанный Группа: Главные администраторы Сообщений: 3127 Регистрация: 7.10.2006 Из: Санкт-Петербург Пользователь №: 4 |
Цитата для 10ти метровой координаты и было задумано применение гидромотора - высокая мощность при небольшом расходе и высокая точность. Ну,вам и карты в руки. И нам расскажете. -------------------- Проблем нет,есть задачи.
|
|
|
|
|
1.3.2010, 7:18
Сообщение
#13
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
Цитата(AlexSpb @ 28.2.2010, 20:35) И нам расскажете. рассказать о чем? о гидромоторе? или о том как я им управлять собираюсь? вот выкладка из параметров электрогидроклапана. Питание постоянным током D00 = клапан без катушек D12 = 12 в D24 = 24 D48 = 48 D110 = 110 D220 = 220 Питение переменным током A00 = без катушек A24 = 24в - 50 гц A48 = 48в - 50 гц A110 = 110в - 50 гц/ 120 в - 60гц A230 = 230 в - 50 Hz F110 = 110 в - 60 гц F220 = 220 в - 60 гц время срабатывания инициирования - 26-75мсек обесточивания - 15-40 мсек максимальная частота включений 18000/час !!! еще есть хитрая приблуда для клапанов Устройство ECL предназначено для управления дискретными электромагнитными клапанами посредством слаботочной команды, которую можно подавать непосредственно с программируемого логического контроллера. — Данное устройство плавно подает на электромагнитный клапан ток величиной 100% от номинального значения в течение первых 170 мс для гарантии полного инициирования клапана. Затем ток автоматически снижается до уровня, который обеспечивает удержание клапана в полностью открытом состоянии (ток удержания). См пример функционирования в параграфе 3. — Устройство выполнено в штепсельной версии в соответствии со стандартом DIN43650. — Поставляется с монтажным болтом M3 и с уплотненительной прокладкой. |
|
|
|
|
2.3.2010, 1:16
Сообщение
#14
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Цитата(andreichsb @ 1.3.2010, 4:18) максимальная частота включений 18000/час !!! получается 5 раз в секунду. если гидравлика сможет "тягать" портал хотябы со скоростью 2000мм/мин, а это 33мм/сек, то за 200мс (1/5 секунды) портал проедет аж 6.6мм. Получается чтобы получить "дискретность" управления хотябы 1мм то скорость придется понижать в 6.6раз тоесть получится 303мм/мин. при точности 1мм.  Ну и какая производительность и точность работы по дереву будет при этом? Это при том что в расчет не принимается сам процесс регулирования, а он предусматривает полный цикл - тоесть движение портала вперед и движение портала назад (при этом клапан сделает больше чем одно срабатывание). С опыта скажу сразу- для резки дерева фрезой, нужна скорость 800- 2000 мм/мин, ато и больше, и при этом точность "попадания" в координату не меньше чем 0.2мм иначе у фрезы могут "отпасть зубы". Если где-то ошибся, подправьте, но думается мне, что система с гидравликой должна иметь другой и более точный механизм управления. |
|
|
|
|
2.3.2010, 8:42
Сообщение
#15
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
Здесь вопрос в другом....
гидравлика продвинет портал и на 10м/мин, сам долгое время работаю с гидравликой (впрочем как и с древесиной в том числе), если не верите - выгляните в окно, там ездит дорожная машина ЗИЛ у которой щетка шириной 2.5 метра вращается против хода машины (какое там усилие???) а приводится вот таким гидромотором - Гидромотор МГП-125 Давление P, атм.: 160 Объем V раб., см3: 125 Частота вращения, об/мин: 186 Крутящий момент M, Нм: 237 по параметрам проходного литража те клапана что я привел как нельзя кстати к нему подходят. размеры 150х100х100 мм при редукции 1 к 20 и диаметре ведущей шестерни 6.3 см получится как раз те же 2000мм/мин (хотя он потянет и без редуктора, напрямую, выдав 30-40 метров/мин) вопрос в том что как раз таки импульсное управление (как в случае с серво приводами) не нужно, зачем клапану работать как игла швейной машинки, если можно его открыть, а по достижении заданной точки закрыть? вот тут и кроется главный вопрос, какая система управления может так управлять. Не считая дорогущих контроллеров Delta пока что нашли только одно решение - ЛИР581 от оао "скбис" (не сочтите за рекламу) да и оно тоже не очень дешево (по крайней мере на данном этапе). |
|
|
|
|
3.3.2010, 1:12
Сообщение
#16
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Цитата(andreichsb @ 2.3.2010, 5:42) Здесь вопрос в другом.... гидравлика продвинет портал и на 10м/мин, сам долгое время работаю с гидравликой (впрочем как и с древесиной в том числе), если не верите - выгляните в окно, там ездит дорожная машина ЗИЛ у которой щетка шириной 2.5 метра вращается против хода машины (какое там усилие???) а приводится вот таким гидромотором - Гидромотор МГП-125 Давление P, атм.: 160 Объем V раб., см3: 125 Частота вращения, об/мин: 186 Крутящий момент M, Нм: 237 по параметрам проходного литража те клапана что я привел как нельзя кстати к нему подходят. размеры 150х100х100 мм при редукции 1 к 20 и диаметре ведущей шестерни 6.3 см получится как раз те же 2000мм/мин (хотя он потянет и без редуктора, напрямую, выдав 30-40 метров/мин) вопрос в том что как раз таки импульсное управление (как в случае с серво приводами) не нужно, зачем клапану работать как игла швейной машинки, если можно его открыть, а по достижении заданной точки закрыть? вот тут и кроется главный вопрос, какая система управления может так управлять. Не считая дорогущих контроллеров Delta пока что нашли только одно решение - ЛИР581 от оао "скбис" (не сочтите за рекламу) да и оно тоже не очень дешево (по крайней мере на данном этапе). Такие системы разрабатывались в ВЭИ (Россия), и управление на основе использования условного прогноза. Это метод математической модели, которая работает немножко быстрее чем реальная (немножко- какая-бы модель ни была точная всеравно ее придется корректировать датчиками реального времени). Эти системы разрабатывались начиная с 70-х из-за того что например нужно было получить чистую синусоиду при всего 4-х переключениях на период (тиристоры в то время не могли быстрее), сейчас же силовые модули стали совершеннее и быстрее а информационная часть более простая, но например в ветротехнике , жестких дисках компютеров, роботах- регуляторы с мат.прогнозом работают. Думаю можно прописать мат-модель в какой нибуть арм-микроконтроллер, в который будет заводиться практически все параметры как текущая скорость, давление, состояние координат и счетчиков, скорость перекачивание жидкостей итд, и производиться нужные вычисления, которые будут правильно и точно управлять клапанами. При желании такие расчеты можно произвести и составить модель такой системы, но это разработка не для одного человека, а хотябы для небольшого инженерного отдела. Кроме самой теории нужен и работающий реальный контроллер, который должен управляться хотябы сигналами step и dir, я уже не говорю о интерполяциях и различных коррекциях которые может вычислять сам контроллер и при этом компенсировать различные массы и силы. Ведь если контроллер знает хотябы 10 будущих кадров, то это несколько упрощает процесс формирования сигналов (есть опыт проектирования микрошагового драйвера который независимо от коэфициента деления будь это /2 или /4 выдает на выходе только синусоидальный ток). |
|
|
|
|
3.3.2010, 1:12
Сообщение
#17
|
|
|
Постоялец Группа: Пользователи Сообщений: 85 Регистрация: 12.12.2007 Пользователь №: 1403 |
Вот вспомнил что в школе учил про замкнутые системы управления с ПИД-регуляторами. Все следящие сервоприводы работают на этом принципе.
Параметры ПИД-регулятора зависят от кучи параметров как станка (моменты инерции, силы трения) так и возмущающих воздействий (изменение сил резания, трения и др). Для сервосистем очень важно правильно настроить параметры этого самого регулятора. Как то работал на станке с расстроенной ЧПУ - в рабочих подачах все отлично, а как быстрый ход так перебег несколько мм и "мягкое" сползание в заданную позицию. Сервоситемы могут управлять любыми приводами и гидравлическими и пневматическими и другим Сервоситемы не импульсные - просто многие из них имеют импульсные входы в качестве опции. Вроде ЕМС2 в определенных пределах справляется с данной задачей. У кого-то на форуме следящая сервосистема на базе этого ПО и шаговых моторов в качестве энкодеров. Посмотрите тут |
|
|
|

|
6.3.2010, 20:12
Сообщение
#18
|
|
|
Новичок Группа: Пользователи Сообщений: 21 Регистрация: 9.2.2010 Пользователь №: 30282 |
то есть если я правильно понял, драйвер сервопривода может отработать сигнал вот такого типа(смотрим рисунок)
отследить по положению энкодера положение станка. меня интересует вопрос такого плана: а программе драйвер дает знать в каком месте в данный момент находиться, ну чтобы не было так: едет каретка упирается в твердый слой дерева(сучок) происходит "пропуск шага" (ну она слегка замедлилась), а программа в свою очередь думает что все идет как положено, и по окончании операции дает движение по другой оси, а в это время станок все еще едет по 1 оси(драйвер додвигает на место каретку так как показания энкодера не совпадают с отданными данными) или же все таки есть какие сигналы что мол операция завершенна и т.д. и еще вопрос(не в качестве рекламы) вот такой девайс: http://texcistrade.ru/catalog/industrial/a.../?descript=7916 справиться с тем что меня интересует или все таки надо будет докупать еще серводрайвер? Сообщение отредактировал ubey_bobra - 6.3.2010, 20:14
Прикрепленные файлы
|
|
|
|
|
6.3.2010, 21:59
Сообщение
#19
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Цитата(ubey_bobra @ 6.3.2010, 17:12) то есть если я правильно понял, драйвер сервопривода может отработать сигнал вот такого типа(смотрим рисунок) отследить по положению энкодера положение станка. меня интересует вопрос такого плана: а программе драйвер дает знать в каком месте в данный момент находиться, ну чтобы не было так: едет каретка упирается в твердый слой дерева(сучок) происходит "пропуск шага" (ну она слегка замедлилась), а программа в свою очередь думает что все идет как положено, и по окончании операции дает движение по другой оси, а в это время станок все еще едет по 1 оси(драйвер додвигает на место каретку так как показания энкодера не совпадают с отданными данными) или же все таки есть какие сигналы что мол операция завершенна и т.д. и еще вопрос(не в качестве рекламы) вот такой девайс: http://texcistrade.ru/catalog/industrial/a.../?descript=7916 справиться с тем что меня интересует или все таки надо будет докупать еще серводрайвер? Из практики скажу- ни концевики, никакие обратные связи ненужны совсем. Только комп, микрошаговые драйвера, блок питания и станок соответственно. От компа до каждого драйвера идет по три провода : земля, step, dir. Если на станке приводы на шаговых двигателях и трапецеидальных винтах 16x4, и движки на 6..8А (удерживает 80кг на валу), то посчитайте с какой силищей винт будет толкать портал. если портал налетит на деревяшку то он ее мигом разнесет в щепки. Эту конструкцию можно сравнивать с тисками или подьемником на несколько тонн. Насчет пропусков шагов- ничего подобного не наблюдается (если драйвера и комп исправны конечно). |
|
|
|
|
7.3.2010, 2:49
Сообщение
#20
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
Цитата(retaler @ 6.3.2010, 21:59) Если приводы на шаговых двигателях и трапецеидальных винтах 16x4, то выйдет весьма оригинальная конструкция - винт длинной 10 метров, огого....... |
|
|
|
|
7.3.2010, 22:51
Сообщение
#21
|
|
|
Завсегдатай Группа: Пользователи Сообщений: 122 Регистрация: 15.6.2008 Из: Киев Пользователь №: 5358 |
Цитата(andreichsb @ 6.3.2010, 23:49) то выйдет весьма оригинальная конструкция - винт длинной 10 метров, огого....... Если винт 10 метров, то крутят не винт а гайку. Болтать винт при его вращении начинает уже на 1.5 метра, причем они все кривые от рождения. Винты 16х4 есть максимально на 3 метра на сколько я знаю (но по заказу думаю можно изготовить сколько угодно.) Все же рекомендую 10 метров по Y не делать, а если уже сделали то ставить зубчатую рейку - жесткость и точность будет выше в разы. Можете применить троса если требования к отклонениям невысокие (трос крайне нестабилен при таких длинах, но дешевле врятли получится). Сообщение отредактировал retaler - 7.3.2010, 22:52 |
|
|
|
|
8.3.2010, 0:51
Сообщение
#22
|
|
|
Прописанный Группа: Главные администраторы Сообщений: 3127 Регистрация: 7.10.2006 Из: Санкт-Петербург Пользователь №: 4 |
Не могу понять что вы обсуждаете.
Это похоже на некие фантазии,на тему:"а если поставить гидравлику",а не реальную задачу. Понять что там и как по этим картинкам -трудно. Фото реальной конструкции и перемещаемые массы-отсутствует. Что там делают эти 6 чудо осей? кроме рейки на 10м можно и цепь крутить и фиксированную цепь и много чего еще. -------------------- Проблем нет,есть задачи.
|
|
|
|
|
8.3.2010, 10:37
Сообщение
#23
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
а зачем вам фото, видео, реальные массы??? я тоже не понимаю... есть вопрос - чем управлять гидравликой (повторюсь, гидравлика сдвинет любые массы)
просто станок уже так сказать второй версии, проходит режим производственных испытаний, потом патентное бюро. Первая версия обсуждалась вот тут.. Так сказать - "засекречено" пока что. |
|
|
|
|
8.3.2010, 10:51
Сообщение
#24
|
|
|
Технический турист Группа: Пользователи Сообщений: 17 Регистрация: 25.2.2010 Пользователь №: 30387 |
|
|
|
|
|
8.3.2010, 12:07
Сообщение
#25
|
|
|
Прописанный Группа: Главные администраторы Сообщений: 3127 Регистрация: 7.10.2006 Из: Санкт-Петербург Пользователь №: 4 |
Цитата а зачем вам фото, видео, реальные массы??? я тоже не понимаю... есть вопрос - чем управлять гидравликой (повторюсь, гидравлика сдвинет любые массы) Затем,что сдвинет любые,но вы усретесь ей управлять. На этой конструкции единственное что представляет повод задуматься,- это продольное перемещение, но и его проще делать не гидравликой,а либо серво, либо плюнув на скорость холостого перемещения -на шаговике.ну,будет 1.5-2метра /мин мах.,но зато просто. Приводить все цепью. на других осях-шаговик и редуктор. И все. Это просто и быстро. -------------------- Проблем нет,есть задачи.
|
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
|
|
Текстовая версия | Сейчас: 8.5.2024, 19:12 |